

一、PNC(智能控制器)技术介绍
基于非实时特征提取+动态决策的控制策略,提出新一代数字化控制系统软硬件体系构架,能够满足决策控制、数据采集、工艺闭环等智能数控功能的实现需求;实现驱控一体,适用于复杂高精度控制任务领域,例如:多轴联动、定位、同步控制,可有效提高控制精准度,机器运动速率,实现真正远程智能化控制。
运动控制硬件平台
二、PNC(智能控制器)特点
1、多轴联动精密运动控制算法:
(1)旋转轴自动补偿RTCP
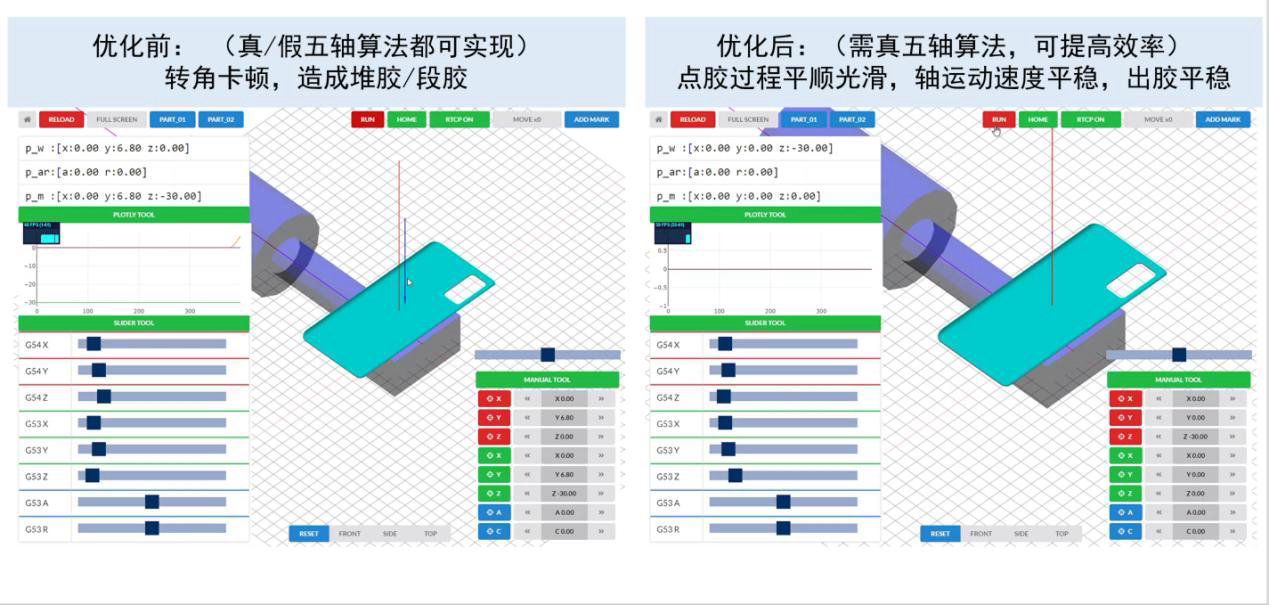
(2)高速高精轨迹平滑
(3)伺服滞后误差补偿
(4)机台几何误差补偿
(5)多轴联动示教
2、网络化嵌入式实时控制器
(1)四核高端处理处理器
(2)双路100M/1G以太网
(3)EtherCAT现场总线
(4)可编程RS485、RS232
(5)全闭环位置控制
3、云架构可视化三维仿真平台
(1)机台/工件模型导入
(2)三维运动仿真
(3)路径编辑、轨迹优化
(4)在线调试、监控
(5)云端监控与数据管理
三、应用领域及案例
自动化机器人系统解决方案
仓储AGV 四向穿梭车、电力巡航机器人、服务机器人、激光叉车、探险机器人、管道机器人、潜水机器人
自动化设备/智能工厂(柔性生产)
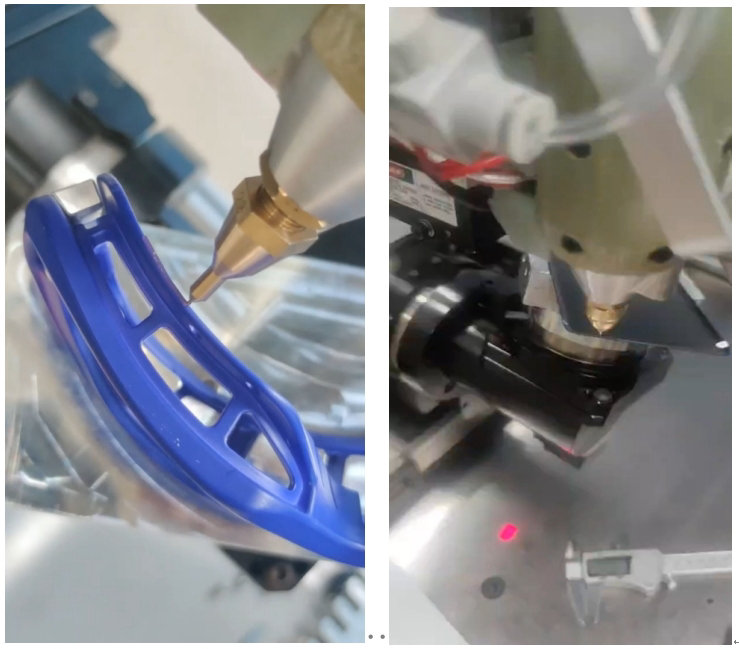
点胶机、贴片机、PCB焊接机、伺服压力机、滴塑、喷涂、码垛、分拣、包装、焊接自动化设备等以及基于实时网络控制的大规模自动化控制系统。
丝线设备
精密钢丝张力控制系统、电脑横机、钩编机、绕线机等
五轴高精端数控机床
四、应用实例
1、五轴机床控制算法及误差补偿
2、点胶机——复杂曲面控制点胶及运动示教仿真、误差补偿